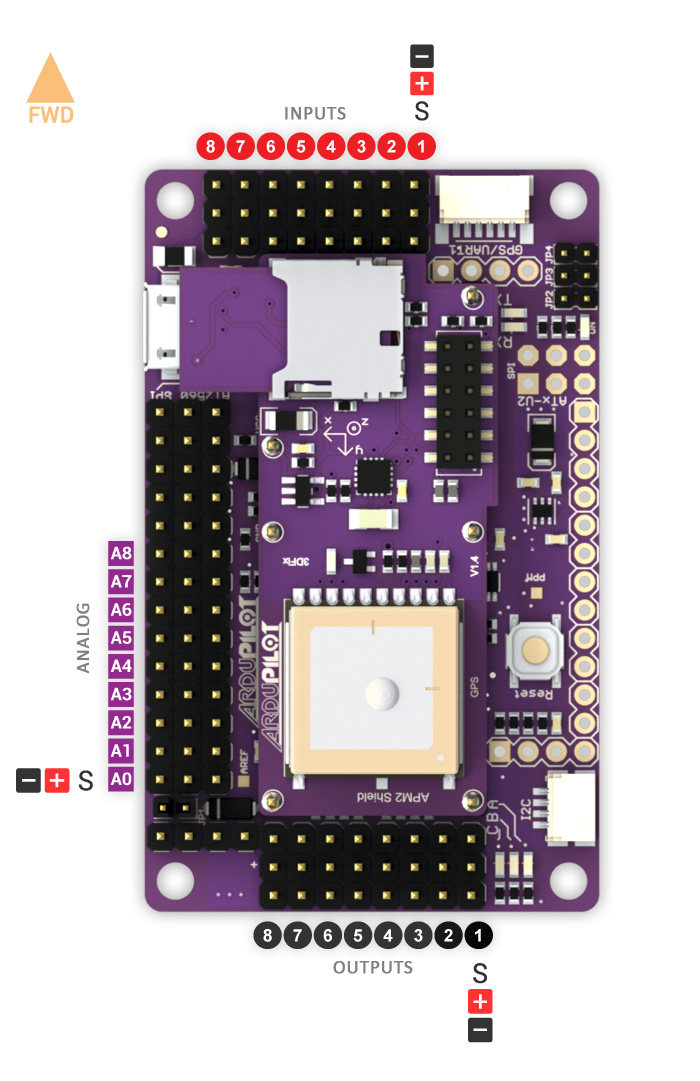
After assembling the frame, mounting the brushless motors and connecting the ESCs, the Ardupilot 2.5 Mega (APM 2.5 Mega) has to be installed wired properly. Here are some pictures and drawings which show the correct connections (first pics come from DIY Drones, copyright by www.diydrones.com ):
I knew that I wanted to build a multicopter and that the ardupilot mega 2.5 should be the platform for stabilization. At that point I did a lot of research work:
Tri-, quad-, hexa- or octocopter?
That qestion was quite easy. The project had to be cheap and simple, too.
So my first idea was the tricopter. It is cheaper than the other multicopters, because you only need 3 motors and 3 speed controllers instead of 4, 6 or even 8 each. But I thought, it would have been to complex for my first DIY project, because the motor has to be movable by a servo.
So, my decission was building a quadcopter. Only 4 motors and controllers, no moving parts except the props. This makes it an easy platform.
After reading in a german rc magazine about the ardupilot mega 2.5 and its incredible possibilities, I was sure that someday I will have got this piece…
… and of course the day came and I was able to order it from lipoly.
Here is a pic directly after opening the box:
Ardupilot Mega 2.5 after delivery
Being so curious to see how it’ll work, immediately after finishing work I uploaded the arduplane software. This way I wanted to check out the stabilization feature via the aileron servo. Here’s a little video showing this feature:
Explanation of the video:
The Ardupilot Mega (APM) is connected via USB to my notebook running the MissionPlanner software. The rc receiver is sends the transmitted signals through the APM to the aileron servo. First I’m using the remote control to steer the servo.
In the second part I pan an tilt the APM, which is stabilizing the „flight“ moving the aileron servo.
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.AcceptRead More