Our FPV racing group „Aircrasher“ wanted to track our lap times. Therefore we decided to use Easy Race Lap Timer Pocket Edition (ERLT PE). To track centralized multiple ERLT PEs we used a Raspberry 3.
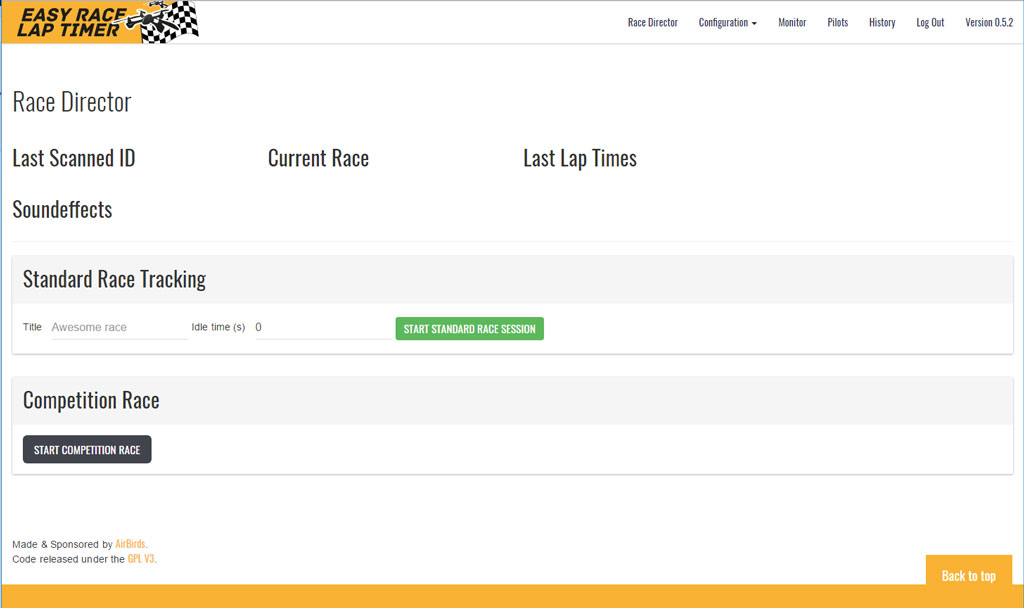
After downloading and installing the easy race lap timer image v0.6.1 from here (www.easyracelaptimer.com/downloads/) for the Raspberry Pi 3, we noticed that it had problems with the sound output. We tried to get it working by patching the error. Unfortunately we couldnt’t fix the problem.
Having spent some hours on the ERLT Image I decided to build my own image from the scratch. And now sound output is working 🙂
EDIT: PDF export isn’t working with this image. You have to execute this command on the ssh shell:
sudo chmod +x /home/pi/EasyRaceLapTimer/web/bin/wkhtmltopdf