For the contruction of the quadcopter’s platform I used the free 3D Software SketchUp by Google: www.sketchup.com
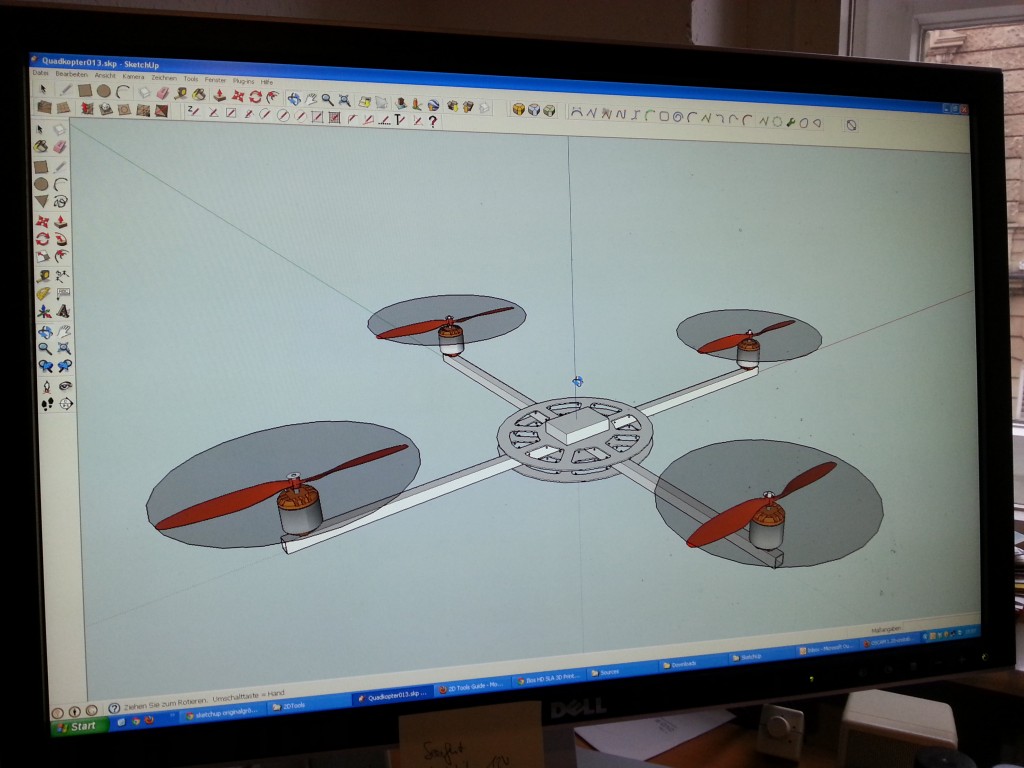

For the contruction of the quadcopter’s platform I used the free 3D Software SketchUp by Google: www.sketchup.com
I knew that I wanted to build a multicopter and that the ardupilot mega 2.5 should be the platform for stabilization. At that point I did a lot of research work:
That qestion was quite easy. The project had to be cheap and simple, too.
So my first idea was the tricopter. It is cheaper than the other multicopters, because you only need 3 motors and 3 speed controllers instead of 4, 6 or even 8 each. But I thought, it would have been to complex for my first DIY project, because the motor has to be movable by a servo.
So, my decission was building a quadcopter. Only 4 motors and controllers, no moving parts except the props. This makes it an easy platform.
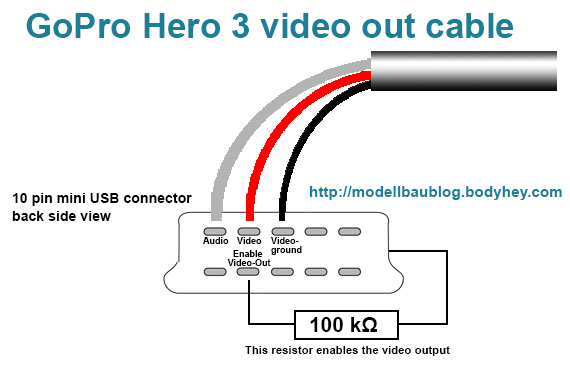
After being interested in FPV and areal video. I wanted to use my GoPro Hero 3 Black Edition as a video camera for FPV. I read about a special cable I had to buy, but on one hand it was pretty expensive and on the other hand it looked very bulky and heavy.
So I found and article of David Windestal, in which he describes how to build your own lightweight video out cable: rcexplorer.se/diy/2012/11/diy-gopro3-video-out-cable/
Thank you very much David!
All you need is a special proprietary 10 pin mini USB connector. Here is the plan how to connect the pins: (At your own risk of course!)
After reading in a german rc magazine about the ardupilot mega 2.5 and its incredible possibilities, I was sure that someday I will have got this piece…
… and of course the day came and I was able to order it from lipoly.
Here is a pic directly after opening the box:

Ardupilot Mega 2.5 after delivery
Being so curious to see how it’ll work, immediately after finishing work I uploaded the arduplane software. This way I wanted to check out the stabilization feature via the aileron servo. Here’s a little video showing this feature:
Explanation of the video:
The Ardupilot Mega (APM) is connected via USB to my notebook running the MissionPlanner software. The rc receiver is sends the transmitted signals through the APM to the aileron servo. First I’m using the remote control to steer the servo.
In the second part I pan an tilt the APM, which is stabilizing the „flight“ moving the aileron servo.
Nachdem ich als Jugendlicher also vor ca. 20 Jahren schon mal ein Modellflugzeug hatte, hat es mich letztes Jahr wieder gepackt und ich bin wieder eingestiegen. Angefixt von meine Bruder, der mich eines Abends mit einem neuen Einsteigersegler überrascht hatte, ging ich am nächsten Tag sofort ins Fachgeschäft und besorgte mir die passende Ausrüstung:
So ausgestattet ging es wieder los…. 🙂
Natürlich blieb es nicht allzu lange dabei und mein Hangar wurde während des letzten Jahres ständig erweitert.
In diesem Blog möchte ich größere und kleinere Projekte, Crashs und deren Reparaturen dokumentieren und meine Erfahrungen mit Euch teilen.
Viel Spaß beim lesen…